Selected Research Projects

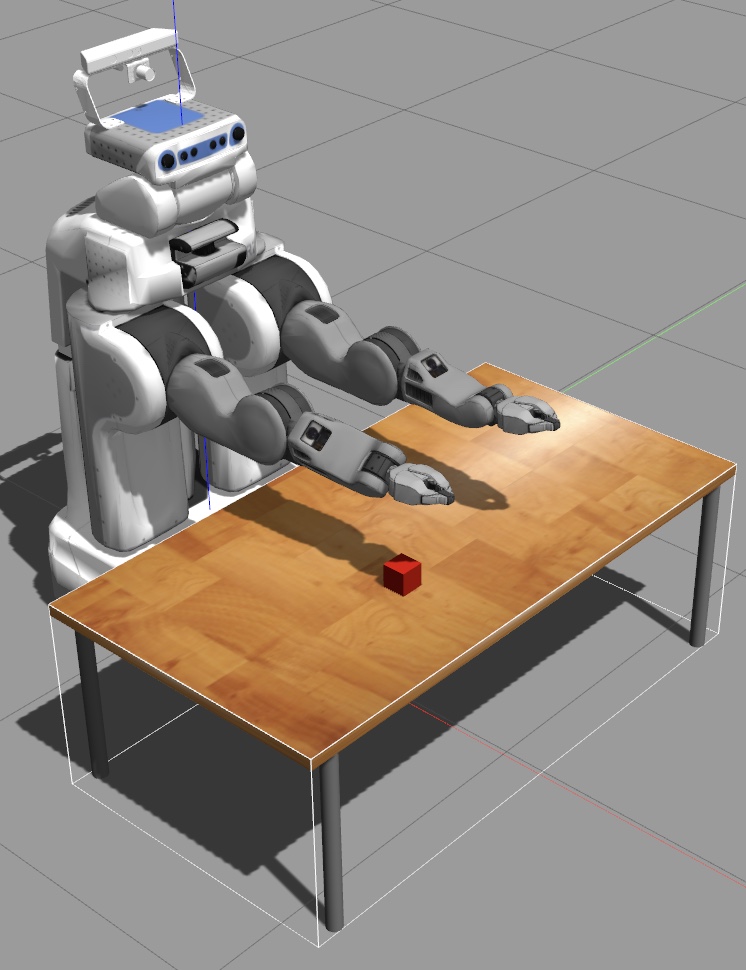
Automatic Curricula via Expert Demonstrations (ACED)
September 2020 - June 2021Advisor: Brian C. Williams, Computer Science and Artificial Intelligence Laboratory, MIT
Goal: To develop an imitation learning algorithm that utilizes demonstrations in an efficient manner and allows robotic manipulators to learn common tasks with as few as one demonstration

Autonomous Valet Parking incorporating Incomplete Map Information
May 2020 - August 2020Advisor: Yebin Wang, Mitsubishi Electric Research Laboratories
Goal: To design a motion planning approach for autonomous valet parking systems in environments with unknown obstacles that can achieve both long-horizon route planning from the parking lot entrance to the parking spot and short-horizon motion planning that properly parks the vehicle without collisions
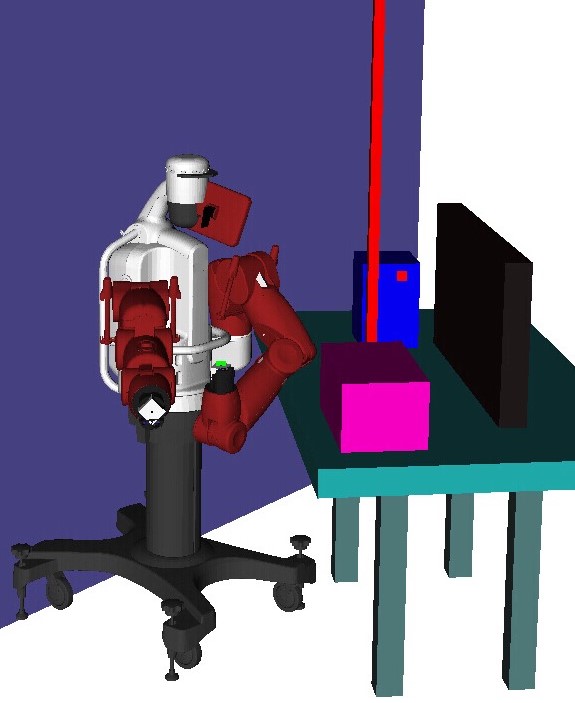
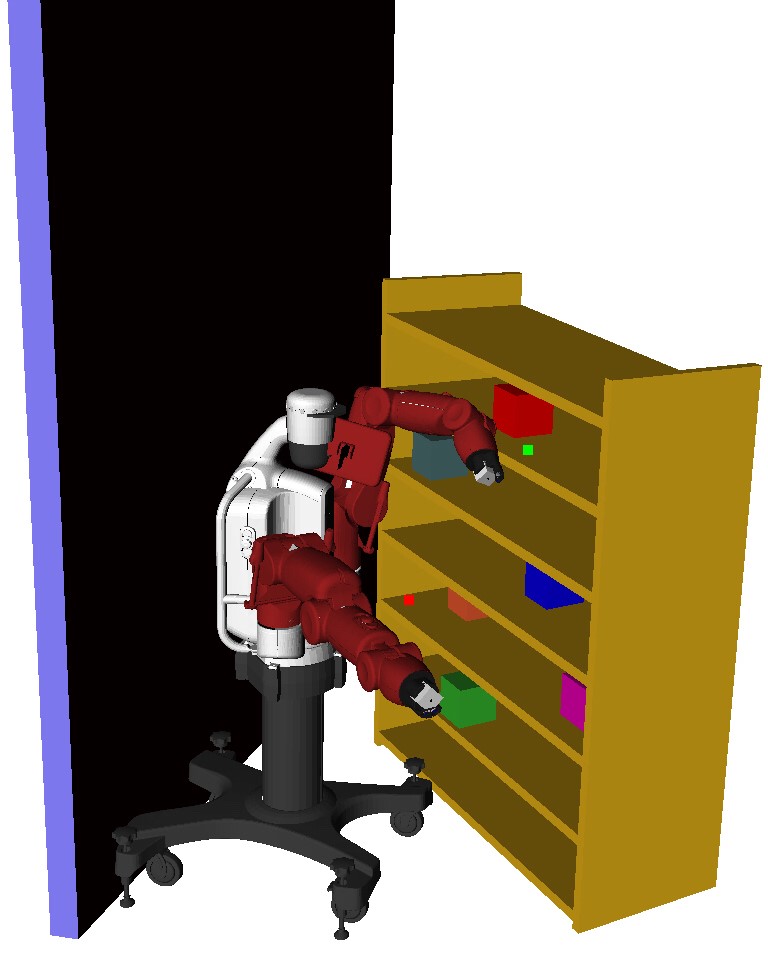
Reinforcement Learning for Robotic Manipulation Tasks with Sparse Rewards
September 2019 - September 2020Advisor: Brian C. Williams, Computer Science and Artificial Intelligence Laboratory, MIT
Goal: To develop a reinforcement learning approach that encourages robots to learn basic manipulation skills through intrinsic exploration, and then transfer the skills to more complex tasks in new environments
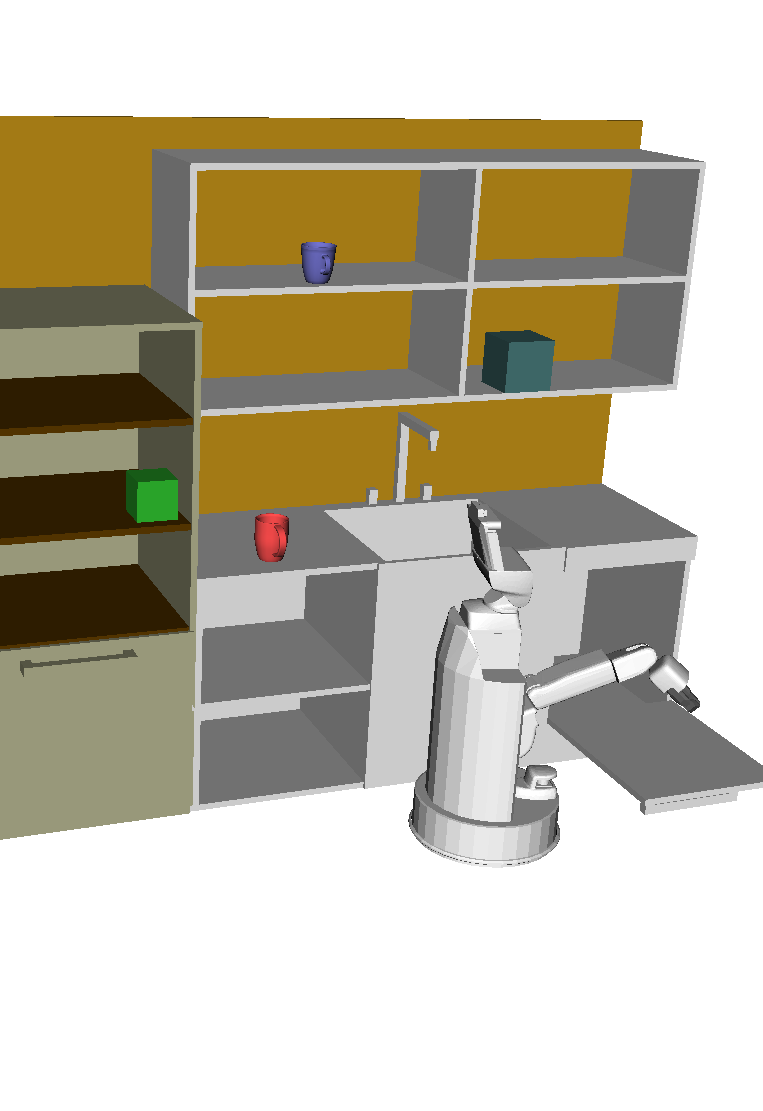
Improving Chance-Constrained Motion Planning using Machine Learning Methods
February - August 2019Advisor: Brian C. Williams, Computer Science and Artificial Intelligence Laboratory, MIT
Goal: To develop an offline learning scheme that can provide faster online reaction time and more accurate collision risk estimation for chance-constrained manipulator motion planning
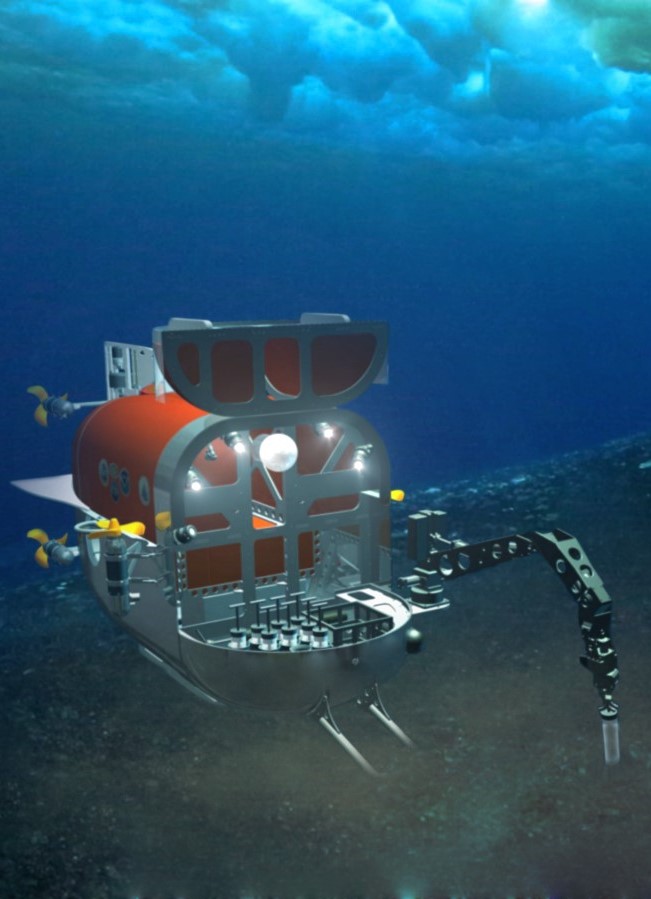
Fast-reactive Risk-aware Robotic Motion Planning and Execution System Design
October 2017 - January 2019Advisor: Brian C. Williams, Computer Science and Artificial Intelligence Laboratory, MIT
Goal: To develop a risk-aware robotic motion planning system that accounts for system process noises and observation noises, and can quickly provide safe plans for robots with complicated dynamics but work under uncertainty, for instance underwater vehicles and human support robots
Motion Planning System Integration with the Toyota HSR Robot
November 2017 - May 2018Advisor: Brian C. Williams, Computer Science and Artificial Intelligence Laboratory, MIT
Goal: To develop the software interface for the Toyota HSR robot so that the Chekov motion planning system our team developed can be applied
Trajectory Optimization in Robot Manipulation Motion Planning
September 2016 - September 2017Advisor: Brian C. Williams, Computer Science and Artificial Intelligence Laboratory, MIT
Goal: To analyze the strengths and weaknesses of the TrajOpt algorithm in robot motion planning, and to improve its performance by providing initial trajectories through sparse roadmaps

Analysis on the Lateral Vibration of Steel Catenary Riser (SCR) Caused by Platform Movement
December 2015 - June 2016Advisor: Shixiao Fu, State Key Laboratory of Ocean Engineering, SJTU
Goal: To reconstruct the experimental response of SCR under platform heave motion through Finite Element Method (FEM), and explore the mechanism for large-amplitude Cross-Flow (CF) lateral movement of SCR
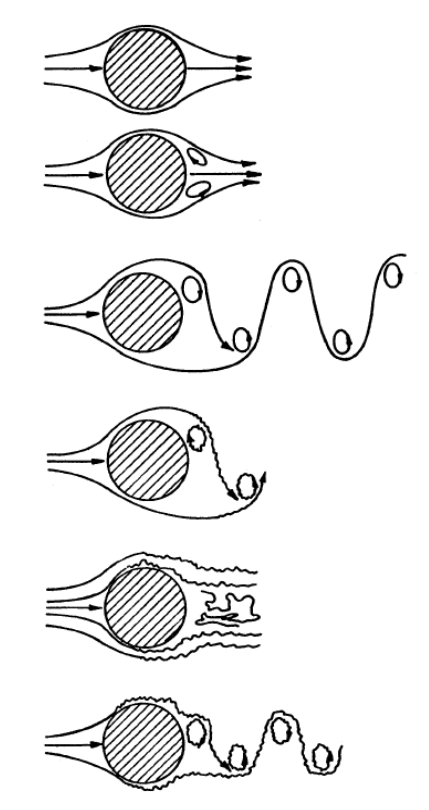
Design of Force-Feedback Experimental Apparatus for Vortex Induced Vibration Analysis
March 2015 - November 2015Advisor: Shixiao Fu, State Key Laboratory of Ocean Engineering, SJTU
Goal: To implement a hybrid experimental equipment by combining force-feedback with on-line numerical simulation, which allows the modeling of complex structural dynamics, while fully accounting for fluid-structure interaction

Analysis of Long Memory and Scaling Behavior for Bulk Carrier Freight Rate Volatility
September 2014 - November 2015Advisor: Feier Chen, Ocean Research Center, SJTU
Goal: To investigate long-range correlation of 10-year Baltic Dry Index (BDI) time series and to study influence of seasonal trends and load capacity on BDI long memory
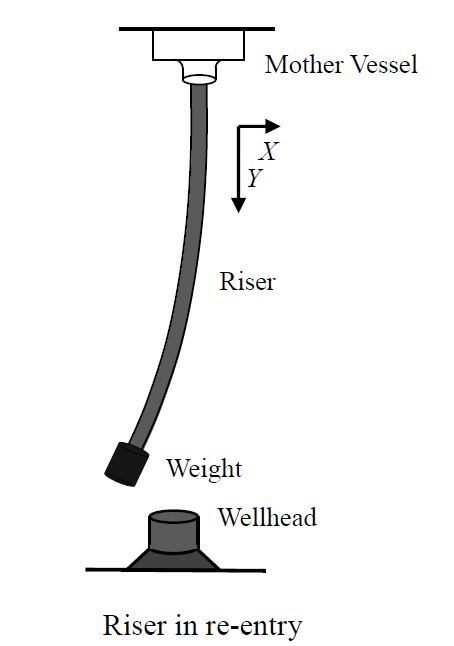
End-to-End Dynamic Response Analysis of Marine Flexible Slender Bodies (MFSB)
May 2014 - October 2015Advisor: Xuesong Xu, Fluid Mechanics Research Laboratory, SJTU
Goal: To analyze dynamic response of MFSB lateral oscillation and to design the optimal upper-end movement maneuver for re-entry operations, marine cable laying and deep-water towing tasks
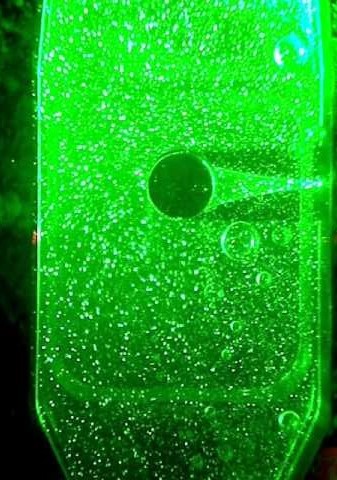
Experiment on Wave Run-up Phenomenon via Particle-Image-Velocimetry (PIV) Approach
September 2014 - April 2015Advisor: Xinliang Tian, State Key Laboratory of Ocean Engineering, SJTU
Goal: To understand influence of waves on columns of semi-submersible platform by studying mechanism of wave run-up phenomenon and to optimize air-gap design of semi-submersible platform by predicting air-gap response